蓝海突围 浅观自动驾驶激光雷达的发展镜像
说到自动驾驶,很多朋友都会想到形形色色的各类传感器、高精地图、GPS等,说到底自动驾驶车型就像一个全副武装的战士般无懈可击。而在这其中,激光雷达则扮演了相当重要的角色,那么激光雷达究竟是怎样的存在,它与毫米波等相比又有怎样的特点呢?接下来我们就对激光雷达一探始末。
激光雷达是什么?

激光雷达简称LiDAR,是一种集激光、GPS全球定位和惯性测量装置为一体的系统,用于获得数据并生成精确的数字模型。这三种技术的结合,可以高度准确地定位激光束打出的位置之所在,相较其他产品,激光雷达可将精准、快速与高效的优势充分进行发挥。
激光雷达相当于人类之眼:

激光雷达通俗来说还是一种传感器,其它传感器还包括摄像头、超声波、红外、毫米波雷达等等,其最大的特点即在于可以生成三维的位置信息,岂能快速能够确定物体的位置、大小、外部形貌甚至材质,同时获得数据并生成精确的数字模型。


相较于摄像头等传感器,激光雷达除了能够生成三维位置模型之外,它的探测距离更远、测量精度更高,同时响应速度也更灵敏,不收环境光的影响。因此激光雷达不仅是相当于给车装了一双眼睛,而且还是一双千里眼。
目前激光雷达的种类:
从类型上来说,激光雷达可以分为机械激光雷达和固态激光雷达,机械激光雷达带有控制激光发射角度的不见,而固态的则依靠电子部件来控制激光发射角度。相比传统机械式,固态雷达扫描范围更大、响应速度更快,成本也得到了有效控制,成为主流不可避免。
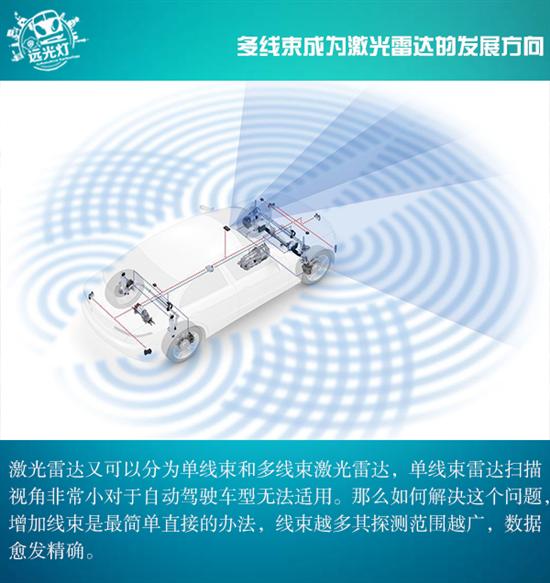
从内部线束数量来说,激光雷达又可以分为单线束和多线束激光雷达,传统的单线束雷达扫描一次只产生一条扫描线,因此其生成的还是平面信息。虽说如此,单线束雷达由于测量速度更快的特点也有着广泛的应用空间,譬如地形测绘等方面。
但传统的单线束雷达由于扫描视角非常小,对于自动驾驶车型肯定无法适用。那么如何解决这个问题,增加线束是最简单直接的办法,线束越多其探测范围越广,数据愈发精确。因此目前市面上的激光雷达产品有4线束、8线束、16线束、32线束以及64线束等等,当然随着时间推移,功能更变态的128线束激光雷达也已经亮相。
“相爱相杀”的激光与毫米波:
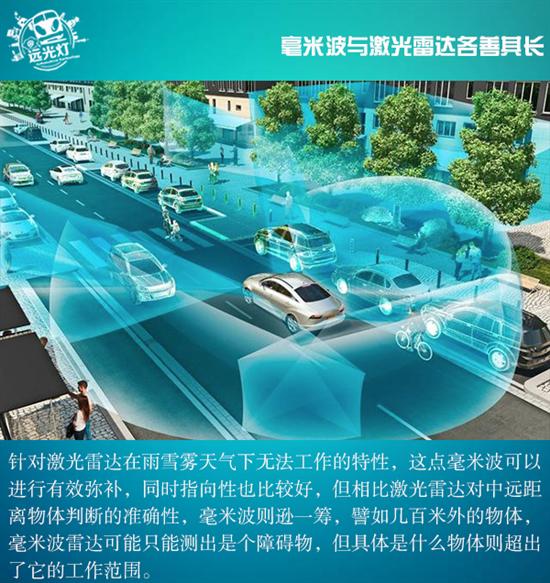
激光雷达与毫米波雷达可谓相爱相杀,针对激光雷达在雨雪雾天气下无法工作的特性,这点毫米波可以进行有效弥补,同时指向性也比较好,但相比激光雷达对中远距离物体判断的准确性,毫米波则逊一筹,譬如几百米外的物体,毫米波雷达可能只能测出是个障碍物,但具体是什么物体则超出了它的工作范围。

但当今的条件下,激光雷达和毫米波已经完成能够做到很好的兼容,加上摄像头它们组成了传感器的“三剑客”,它们的功能由本身的性质所决定,三者都不可或缺。
毫米波雷达主要用还是在障碍物检测;摄像头很难得到三维物体的模型,包括它对于环境的干扰也比较依赖这个光照的影响,但摄像头对物体分类和跟踪是非常好的;激光雷达普遍用于定位、障碍物检测、物体分类、动态物体跟踪等应用。
激光雷达精度竟不是越高越好?

很多朋友都以为,在科技快速发展的今天,雷达的精度自然是越高越好。但殊不知这其中涉及了一个偏差的误区。以激光雷达为例,其获取的数据是判断障碍物类型、处于运动中的物体的监测的关键,如果精度太差自然无法识别,这个我们都可以理解。但如若精度太高呢,其对激光雷达甚至自动驾驶车型的其它零部件都会提出相当高的要求,除了徒增有些根本不需要的工作量之外,运行成本也会无形中增加不少,甚至可能会缩短车辆寿命,因此还是应了那句话“不多不少,适量就好”。
没有激光雷达自动驾驶怎么办?
自动驾驶必须用激光雷达,如果激光雷达能有效控制成本,ADAS等级数较低的驾驶辅助功能也需要用激光雷达。究其原因,基于摄像头的ADAS和无人驾驶系统,或者单独使用毫米波的局限性相当之大。
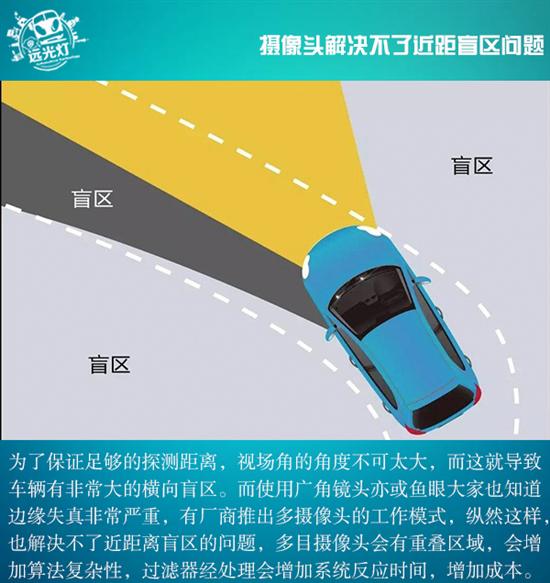
首先是视场角的问题,为了保证足够的探测距离,视场角的角度不可太大,而这就导致车辆有非常大的横向盲区。而使用广角镜头亦或鱼眼大家也知道边缘失真非常严重,针对此有些厂商推出多摄像头的工作模式,纵然这样,也解决不了近距离盲区的问题,同样的多目摄像头会有重叠区域,这样做会增加算法的复杂性,使用过滤器再经处理会增加系统反应时间,增加成本。
其次是低速问题,摄像头对于车辆低速下的表现不好,甚至出现对那些静止目标和缓慢移动的目标无法识别。毫米波则可能只能识别出是障碍物,对与到底是人还是障碍则显得多少力不从心,没有激光雷达,甚至寻找激光雷达的替代品,这条路都将步履艰难。
当然要解决自动驾驶的问题,产业链的完善和配套也是不容忽视的问题。据笔者跟相关人士交谈了解到的消息看,未来几年自动驾驶汽车的激光雷达、自动驾驶芯片以及电动车电池组都或多或少会遭遇产能无法匹配的问题,对高昂的成本控制也是一大难题。因此除了5G等硬性条件外,自动驾驶之路依然任重道远,激光雷达的镜像仍然存在未知。
编者说:
由上可见,没有激光雷达,自动驾驶的发展将寸步难行。但纵然如此,对自动驾驶车的安全性也尤其要格外重视,哪怕现在的安全率达到99%也不行,因为剩下的那1%很可能是人,而这点在之前的美国亚利桑那州uber事件上已经有了血的教训。我们希望未来的自动驾驶车型能以更好的姿态出现在我们面前,但冰冻三尺非一日之寒,罗马建成亦非以一日之功,我们会对这条漫漫长路的探索保持足够的耐心,蓝海突围,指日可待!
「蓝海突围 浅观自动驾驶激光雷达的发展镜像」相关推荐
「蓝海突围 浅观自动驾驶激光雷达的发展镜像」相关文章
- 自动驾驶需要更智能的激光雷达和传感器融合
- 研发自动驾驶 沃尔沃投资激光雷达初创公司
- 充电9分钟续航200公里 配激光雷达/自动驾驶
- 奥迪携手Luminar 为自动驾驶车部署激光雷达
- Insight推FMCW相干激光雷达 为自动驾驶服务
- 重返自动驾驶 苹果洽谈激光雷达传感器合作
- Wayve:无需激光雷达 也能造自动驾驶车
- 自动驾驶Aurora收购激光雷达公司Blackmore
- Dataspeed自动驾驶平台采用Ouster 激光雷达
- 塔塔子公司测试无人驾驶 车上装3D激光雷达