自动驾驶需要更智能的激光雷达和传感器融合
Ibeo已经联合国内合作伙伴欧百拓,开启了本地算法的研发工作。
今年奥迪发布带有L3自动驾驶功能的A8时,很多人都注意到了新车前脸的一款激光雷达——ScaLa。ScaLa是全球第一款车规激光雷达,研发设计它的是一家德国公司Ibeo Automotive Systems GmbH。
Ibeo并不是一家初创企业,1998年6月1日创立时,公司的主要业务就是车载激光雷达。在经历了2000年被并入SICK AG(一家工业传感器系统供应商),2009年被现总裁买断独立之后,便有了今天的智能驾驶激光雷达系统供应商Ibeo Automotive Systems GmbH。
和很多公司不同,Ibeo既可以提供激光雷达硬件,也可以提供配套的软件算法。正是因为在软件算法方面的积累,Ibeo的现有业务已经从出售激光雷达软硬件产品,扩展到了传感器融合,乃至提供整套ADAS系统。
虽然Ibeo已经在车载激光雷达领域潜伏了好多年,但在国内举办用户大会还是第一次。11月20日Ibeo联合国内合作伙伴北京欧百拓信息科技(以下简称“欧百拓”)正式亮相,Ibeo CEO Dr. Ulrich Lages向我们揭晓了一款更适合未来自动驾驶汽车的新一代3D固态激光雷达,也分享了一些Ibeo的经验和本土化思路。

Ibeo CEO Dr. Ulrich Lages
聪明的激光雷达知道“该看什么”
Ibeo成立至今,出售的激光雷达都是内部机械旋转式。产品主要有两款:一款就是和一级供应商法雷奥合作,完成车规量产的4线激光雷达ScaLa;另一款是LUX系列,有4线、8线两类,是很多自动驾驶预研项目中采用的重要传感器。
为了让传感器更智能,Ibeo会为自己的激光雷达产品提供点云处理和软件算法。目前Ibeo算法支持车道标线、目标物识别,支持的目标物分类包括乘用车、卡车、自行车和行人等。
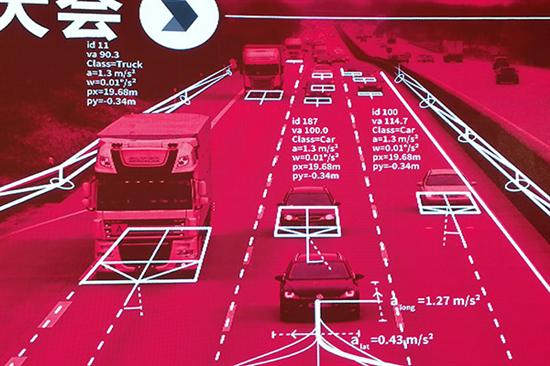
在Ibeo用户大会现场,我们可以看到一张使用Ibeo激光雷达探测路面的示意图,对于Ibeo探测到的物体,都会被标准上具体分类,并提供道路信息。
在观察Ibeo现有产品时,我们很容易发现一个特点——Ibeo的机械旋转式产品只有4线和8线,适用于ADAS功能。而很多目标要做自动驾驶的公司,都在出售多线数3D扫描式激光雷达。
在我们提问线数是否越多越好时,Dr. Ulrich Lages把这个问题拆解成了两个部分来作答:1. 多线数机械旋转式激光雷达是未来车载激光雷达的方向吗?2. 自动驾驶需要的激光雷达一定是360°高分辨率吗?
对于第一个问题,Ibeo从车规和成本的角度考虑,看到了多线数机械旋转式激光雷达面临的挑战。机械旋转式的多线激光雷达的确可以获得更大的视场角,但收集的点云数据越多,对计算资源能力的要求也就越高,同时还要解决额外的供电和散热问题。机械旋转式的多线激光雷达是实现高分辨率探测的一种方法,但从车规和降成本方面考虑,是有瓶颈的。
第二个问题的想法比较特别。根据Ibeo的经验,我们需要的高分辨率并不是全环境的高分辨率,要做的第一步其实是发现哪些是真正影响本车行驶的路面目标。就像人开车看路时,对焦区域也只有5°,激光雷达不必达到全视野的“清晰”,聚焦区域外的阴影变化,就已经足以支持激光雷达做出判断。最后适用于自动驾驶的激光雷达,可以智能锁定那些会对本车产生影响的目标物,再把足够多的分辨率分给这个目标物。
因此对于未来的自动驾驶激光雷达,Ibeo选择直接跳过机械旋转式的多线数激光雷达,把更多精力放在下一代雷达技术研发上。他们认为下一代车载激光雷达应该彻底摆脱掉旋转部件,而且在“该关注什么”这件事情上足够智能。

Ibeo固态激光雷达模型
在接受车云菌专访时,Dr. Ulrich Lages介绍了他们心目中的下一代激光雷达 ——固态3D激光雷达。关于这款产品的技术方案他没有透露,只是向我们揭晓了产品的部分参数:探测范围可以达到0-300米,水平视场角范围可以根据客户需要定制。第一代固态激光雷达的水平角分辨率会做到0.25°,第二代升级为0.1°。
目前这款固态激光雷达还在A Sample阶段。2016年8月1日,采埃孚收购了Ibeo 40%的股份,主要合作研发的就是这款新型固态激光雷达。根据计划,新款固态3D激光雷达会在2021年完成车规量产。
自动驾驶需要原始数据层的融合
在聊到传感器融合时,Dr. Ulrich Lages认为现有的传感器融合方式(目标层融合)不能满足自动驾驶的安全需要,未来我们需要原始数据(Raw Data)层的深度融合。
这里做一个简单的科普。
所谓目标层的融合,是指摄像头、激光雷达、毫米波雷达这三个核心传感器各自提取目标,然后不同传感器间比对,得出一个结果——比如前方有一辆卡车。
这种融合方式会有一个问题——当不同传感器各自生成目标时,和目标无关的数据就会被丢掉。但实际上这些被过滤掉的原始数据可能包含有意义的特性信息,可以跟其他传感器数据融合,帮助做出更准确的判断。
一个例子很容易形容目标层融合出现的分歧。

上图中因为角度的问题,每个传感器看到的红球数量是不一样的。1号传感器检测到一个物体,2号传感器检测到两个物体。于是在传感器融合时出现了无法判断的情况。
Dr. Ulrich Lages认为,相比每个传感器给出自己的判断,更重要的是传感器告诉你它可能漏掉了什么。传感器融合的工作是建立一个数学模型,输出对目标物体可能性的一种描述。
因此,上面例子中,1号传感器在有限的视野中只检测到了一个物体,但它提交的报告应该是:因为有物体遮挡,所以我能确定的物体是“有一个,但还可能存在其他物体”。2号传感器可以毫无疑问地“确认检测到两个物体”。这样,传感器融合后可以轻易得出“前方有两个物体”的结果。
鉴于对传感器融合的理解,Ibeo除了提供激光雷达软硬件产品,还延展到提供传感器融合服务,核心技术就是建立上面提到的数学模型。
Dr. Ulrich Lages告诉车云菌,Ibeo自2005年开始研究多个激光雷达传感器的数据融合,并在几年前开发了新的概念模型,用于激光雷达和其他传感器数据的融合研究。他们在定义传感器融合的标准接口,包括每一类传感器在融合时提供的数据结构、采用的数据加密模式。
中国的本土研发与产品化
不同地区的交通场景不同,决定了自动驾驶研发需要区域定制。在中国,帮助Ibeo在中国落地产品的是欧百拓,这家初创公司成立于2015年初。其创始人剧学铭博士曾在德国慕尼黑工大任教,有多年参与宝马研究院自动驾驶项目的经验。
经历了激光雷达的科普期后,目前欧百拓根据中国市场的自动驾驶研发需求,主要在做两项工作。
一项是提供用于自动驾驶评测的参考平台。
例如在验证待测视觉传感器技术是否达标时,传统方法是人工在线下一帧一帧捕捉摄像头收集到的图像,标记出行人、车辆等目标。这种做法效率低,时间成本高。Ibeo的评测平台用激光雷达和算法代替了人工。在公共道路完成测试后,研发人员可以将数据导入到这个平台,自动完成对真实数据的标定。

欧百拓的测评车
另一项工作是做本地的算法研发,进行激光雷达的数据采集和场景分析工作。
车云菌在会场外,看到了一辆Ibeo欧百拓的数据采集车。车上有六个LUX四线激光雷达,和两个Sick一线激光雷达。欧百拓工程师告诉我们,采集车主要做的工作是采集本地数据,用于激光雷达软件算法研究,希望能提供更适用于中国交通环境和驾驶习惯的软件算法。剧学铭博士告诉车云菌,欧百拓与Ibeo合作的本地化自动驾驶落地项目,也将在近期公布。
车云小结
对于自动驾驶需要什么样的激光雷达,Ibeo给出的答案很克制。Dr. Ulrich Lages强调,满足未来L4L5自动驾驶的传感器还未出现,不同传感器都要做技术迭代。剧学铭博士也告诉车云菌,要实现数据层的深度融合,不同传感器之间的配合会更紧密,需要更深层的数据共享。
因为很早就和车企共同进行自动驾驶预研,我们在和Dr. Ulrich Lages讨论产品时,可以感受到一种“熟知完整系统后再收敛到具体模块需求”的思考模式。这是在和其他激光雷达公司交流时,从未获得的体验。Ibeo也在用这种模式,探索着自动驾驶最终落地的方式。
「自动驾驶需要更智能的激光雷达和传感器融合」相关推荐
「自动驾驶需要更智能的激光雷达和传感器融合」相关文章
- 华为将为自动驾驶开发雷达 建车载传感器
- 蓝海突围 浅观自动驾驶激光雷达的发展镜像
- 丰田最新自动驾驶平台增加激光雷达
- 通用收购激光雷达公司 加快自动驾驶市场化
- 通用收购激光雷达公司 大力进军自动驾驶
- 中国人开发的自动驾驶激光雷达已达300线
- 研发自动驾驶 沃尔沃投资激光雷达初创公司
- 充电9分钟续航200公里 配激光雷达/自动驾驶
- 奥迪携手Luminar 为自动驾驶车部署激光雷达
- Insight推FMCW相干激光雷达 为自动驾驶服务