揭秘Waymo是如何进行自动驾驶测试验证
在谷歌母公司Alphabet园区的一角,有一个团队正在研究一款软件,而这款软件可能是自动驾驶汽车的核心。不过在接受采访之前,没有哪个记者见过它是如何运行的。而团队为其取名为「Carcraft」,这显示是在向游戏《魔兽世界》致敬嘛!
Waymo自动驾驶仿真模拟架构软件
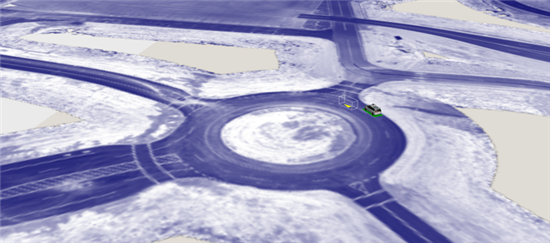
开发出「Carcraft」的是一个头发蓬乱、有着一副娃娃脸的年轻工程师James Stout。在一间安静的开放式办公室,他坐在我旁边,戴着耳机,眼睛盯着屏幕上显示的一个虚拟的环岛线路图。对普通人来说,其实没什么太多可看的,因为整个画面不过是在道路背景上出现了一些渲染的简单线条。我们能看到一辆克莱斯勒Pacifica自动驾驶原型车,还有被简单线条框住的另一个物体,它代表了另一辆车的存在。
几个月前,Waymo的某个自动驾驶汽车测试团队在德州就遇到了类似的交通场景,当时的车速以及复杂的状况都让路测的自动驾驶原型车非常困惑。所以Waymo的开发人员决定在测试厂建一条看起来像真实路面的道路。我所看到的是机器学习过程中的第三步,即真实驾驶的数字化模拟。在这里,现实生活中常见的驾驶行为,比如在环岛中行驶的一辆车被另一俩车加三儿,这样的场景可以衍生出成千上万个仿真场景,来测试无人驾驶汽车的能力极限。
类似场景为Waymo强大的仿真设备奠定了基础。Stout告诉我,“我们完成的绝大多数工作,都得益于仿真测试中得到的结果”,这也是Waymo自动驾驶汽车研发加速的重要工具。而如果Waymo未来几年能够量产无人驾驶汽车,Carcraft最应该被人们记住。Carcraft作为一个虚拟的世界,在重塑现实世界方面起了巨大作用。
自动驾驶仿真测试软件「Carcraft」
最初开发Carcraft是作为一种"回放”无人车在公共道路行驶经历场景的方式,之后慢慢发展成了仿真,并在Waymo自动驾驶项目中发挥了重大作用。
目前有2.5万辆虚拟自动驾驶汽车一直在奥斯丁、山景城和凤凰城的全建模版本里进行道路仿真测试,这其中还包括了一些赛道测试的场景。Waymo可以在一天内沿着一条特别复杂的道路模拟行驶数十万次,总行驶里程可以达到800万英里左右。2016年,与谷歌IRL自动驾驶汽车在实际公共道路上运行的300多万英里相比,Waymo已经行驶了25亿英里的虚拟路程 。值得一提的是,这部分虚拟测试远比在现实高速公路上的测试有意思得多,因为工程师总是能学到一些新东西。
仿真测试是Waymo自动驾驶汽车研发中的一部分,仿真将Waymo自动驾驶原型车在实际道路中的测试与中央谷地一个叫做「城堡」(Castle)的秘密基地进行的“结构化测试”项目紧密结合在了一起。
Waymo 此前从未公布过「城堡」的内部运作细节。在实际公共道路上进行的测试能够让开发人员知道需要在哪种地形进行额外训练。随后他们将这种地形在秘密基地「城堡」中复刻,使得测试车辆能够在不同的场景中进行训练。在这两种实体测试中,Waymo的自动驾驶原型车捕获了足够数据,未来可以在任何时候进行全数字化的仿真模拟测试。在虚拟空间中,工程师可以解除真实世界的限制,并创造出数千个任何单一场景的变形,然后通过这些场景进行无人车的仿真测试。而随着自动驾驶软件的不断改善,实体测试车的表现会逐步提升,而整个测试的闭环又重新开始了。
走进Waymo的神秘「城堡」
想要到达「城堡」,你需要从湾区出发向东开,上了中央谷地高速公路后向南开到弗雷斯诺。在那里,玉米地紧靠欠开发地区,地平线消失在忙忙的庄稼地里。这里要比旧金山热得多,而且平坦得像约翰·麦克菲口中的“荒原”,平到只能用激光来测量。你离开阿特沃特附近的小镇,曾经的城堡空军基地的家,这里曾经有6000多人在进行B-52项目。现在,它在小默塞德新城北部边缘地区,早在2010年,那里的失业率就突破了20%,直到现在仍然很少低于10%。在这里说西班牙语的人占百分之四十。我们穿过铁轨,绕到1621亩的老基地,它现在拥有从默塞德县动物控制中心到美国阿特沃特监狱的一切。
我手机上的导航系统不是指向某一个地址,而是一套GPS坐标。我们沿着高高的不透明的绿色篱笆前行,直到谷歌地图告诉我们停止。这里没有任何迹象表示这里曾经还有一个门,它只是看起来像另一段围墙,但陪我前来的Waymo工作人员很自信没有带错路。果然,一个保安出现了,从围栏上的一道缝隙探出身子来检查我们的证件。
栅栏移开了,我们开车到一个繁华的小园区。身着短裤戴着帽子的年轻人走来走去。这里有可移动的建筑物,圆顶车库,还有不同类型的自动驾驶原型车,你最有可能在公共道路上看到雷克萨斯、已经停产的普锐斯 、以及新款克莱斯勒Pacifica。
自动驾驶汽车很容易被挑出来,因为它们全身布满各种传感器。最突出的是车顶上的激光雷达。不过除了车顶的大家伙之外,克莱斯勒Pacifica自动驾驶原型车的外后视镜上还装了像啤酒易拉罐大小的激光雷达。有的雷达安装于车的后部,看起来很像怪物史莱克的耳朵。
当自动驾驶汽车的传感器工作时,或者是在停放车时,旋转的激光雷达会发出一种奇怪的声音。有点像介于呜呜声和撞击声之间的声音,它是如此奇特以致于我的耳朵不能把它过滤出来,像是伴随我长大的汽车噪声的尾声,令人不舒服。
这里还有一辆更特殊的车子停在主楼对面的街道上,身上绑满了写有不同大小“X”字母的胶带。这是辆符合SAE制定的L4级别的自动驾驶原型车,它不仅可以完全自动驾驶,也不需要坐在车里面的人操控,和其他测试车是有根本区别的。
走进主楼,我见到了Steph Villegas,她是推动「城堡」项目运行的中坚力量。她穿着长长的白衬衫,破洞牛仔裤,灰色的针织运动鞋,在2011年加入谷歌自动驾驶汽车项目前,她是加州大学一名美术专业的学生。
我问,“你是司机?”
Villegas说,“我一直都是司机。”
她在通往旧金山和山景城之间的101和280号公路上花了无数的时间。就像其他的司机,她开始对汽车在开阔的道路上的表现有了初步的了解。这也被看作是自动驾驶项目中的一种重要的知识。慢慢地他们对自动驾驶汽车可能遇到的困难有了直觉。她告诉我:“通过在新软件中做一些测试并在团队中工作了一段时间,我开始考虑我们可以挑战系统的方法。”
所以,Villegas和一些工程师开始编制和筹划稀有的场景,这样的场景可能会让他们以可控制的方式去测试新的驾驶行为。他们开始占用对面露天剧场的停车场,并且在所有入口派人把守以确保只有经过批准的谷歌员工才能入内。
她说,“这是它开始的地方”。“每周我和其他几个司机都会提出一些我们想要测试的东西的事情,之后开一辆卡车带上我们的必须用品到停车场,开始进行测试。”这些成为了谷歌自动驾驶项目的第一个结构化测试。
Villegas 开始收集道具,假人、圆锥体、假植物、孩子的玩具、滑板、三轮车、娃娃、球、装饰物等等,这些现在都保存在「城堡」的道具仓库中。

「城堡」中用来存放自动驾驶测试道具的仓库
他们需要一个基地,一个秘密基地。这就是「城堡」所提供的。他们签署了一份租约,开始建立自己梦想的虚假城市。她说:“我们在设计住宅街道、高速公路、死胡同、停车场等方面做出了明智的决定,所以我们有了一个代表性的特色设施。”
我们从拖车办公室走到她的车。Villegas递给我一张地图,说,“就像在迪斯尼乐园,你可以跟着地图走。”地图已经准确标明了「城堡」每个角落,我看到有一个拉斯维加斯风格的标志,上面写着“欢迎来到加利福尼亚的神话城堡。”园区的不同部分甚至有他们自己的命名约定。我们穿行在园区,每条路都是以一辆著名的汽车或一辆项目早期普锐斯车队的汽车命名的。
我们路过一簇粉红色的建筑,旧军队的宿舍里,不过已经重新装修过。当waymo的员工不能回到湾区时,这里就是他们可以休息的地方。除此之外,在测试区没有其他建筑物。它其实是一个专为自动驾驶汽车开辟的城市。
我们走到一个大的两车道环岛。在中心,有一圈白色的栅栏。Villegas说,“这是我们在得克萨斯州奥斯汀经历了一个多车道的环形交叉路口后,专门安装的这个环形交叉路口。
我们停了下来,盯着一个新增加的部分 :两条车道和一条自行车道穿过平行停车场,紧挨着一块草地。她说,“当时我真的热衷于沿着平行停车场安装东西。像这样的事情发生在郊区商业区,包括沃尔纳特克里克、山景城、帕洛阿尔托。”人们走出商店或公园。穿行在车辆之间,也许过马路时还拿着东西。这条小路就像她自己记忆中的一块碎片,她被嵌入在沥青和混凝土中,这将使它成为一种更抽象的形式,提高了机器人处理她的家乡地形的能力。

「城堡」中用来测试无人车性能的双车道罗盘
她开车带我回到总公司,我们上了自动驾驶汽车,是一辆克莱斯勒 Pacificas 。我们的"左座"司机是 Brandon Cain。他的”右座”,也就是乘客座位的副驾驶将使在笔记本电脑用XView软件追踪汽车的性能。
然后还有测试的助手,他们称其"狐狸",是从”faux”一词演变而来的绰号。他们驾驶车辆,创建交通场景,充当行人、 骑自行车,举着停车标。他们是演员,其观众是车。
我们要做的第一个测试是“简单的通过和突然插入”,但是在高速条件下,这意味着车速每小时45英里。我们沿着一条他们称之为高速公路的宽阔道路一直走下去。
在“狐狸”突然蹿出后、 Waymo 汽车将制动,接着团队将检查关键数据点:车子的减速情况。他们正在尝试生成导致车辆急刹车的场景。
让我和大家分享一些有意思的东西:这已经不是我第一次乘坐自动驾驶汽车。在过去,我已经有过两次不同的自动驾驶之旅: 第一次是雷克萨斯的SUV,带着我穿过了山景城的街道,第二次是可爱的小萤火虫,带着我绕着谷歌大楼的屋顶打转。他们是两次不起眼的行程,却很关键。
但是,这次在「城堡」的试乘体验是不同的。这是两辆高速行驶的汽车,其中一辆从我们的车前面蹿出,用Waymo的艺术术语来说就是”刺激“。
该走了。Cain让我们动起来,这时车里响起小钟声,车发出“自动驾驶”命令,另一辆车接近我们,保时捷司机突然蹿出并试图超过我们。我们急刹车,快速而平稳,这给我留下了深刻印象。
然后他们检查减速数据并意识到我们的刹车不够急。我们必须得再做一遍,一遍又一遍。另一辆车以不同的角度、 用不同的方法蹿出。他们把这叫做"覆盖"。
我们经历了其他三个测试: 高速并道;遇到一辆在车道上倒车的车,另一辆车却挡住了自动驾驶汽车的视线;当行人把篮球丢向我们的车道时如何平稳地停住。每项测试都用自己的方式给我们留下了深刻的印象,但切断道路测试给我的印象最深。
当我们排队等候另一轮测试时,Cain从他的座位起来,并问我,"你看过《环太平洋》吗?你知道在吉列尔莫·德尔·托罗(Guillermo del Toro)的电影里,男演员们与如何与大型机器人群同步并和怪物战斗吗。我在尝试与这辆车同步,和它们分享我的想法。”
我请Cain解释他所谓的与汽车同步的真正意思。他说"我尝试着在车里更换不同重量的人。跟车子待久了,我能感觉到这辆车做什么,虽然这听起来很奇怪,但就像了解自己的屁股一样,我总能知道它想要做什么。”
告别了「城堡」的雾霾和酷热,来到了在山景城谷歌的总部。我来拜访了Waymo的工程师,他们住在Google X内部,是Google X的技术支持,你可能知道Google X是公司的一个长期的、高风险的研究部门。在2015年,谷歌进行了重组,成立了母公司Alphabet,X部门从谷歌中退出。在大重组一年后,就像它之前在其他几个项目上所做的那样,X/Alphabet决定将自动驾驶汽车项目过渡到自己的公司,这个公司就是现在的Waymo。Waymo就像Google的孩子,只不过曾经脱离出去了,或者是换个说法。
不可或缺的仿真测试
Google X实验室/ waymo的办公楼宽敞又通风,旁边悬挂着飞翼计划的无人机原型。我看到了一些公司制造的可爱的小萤火虫汽车汽车。从自助餐厅出来,在飞翼模型的一个边角,是Waymo的模拟集群。在这里,似乎每个人的屏幕上都有Carcraft和XView,黑色背景上的多边形比比皆是,这些是工程师们为Waymo的汽车搭建的虚拟世界。
等待我的是James Stout,Carcraft的创造者。他永远不会公开谈论他的计划,他的热情溢出,把Carcraft看作是他的孩子。
他说,“我只是浏览了一下招聘信息,发现无人驾驶汽车团队在招聘员工,我真的不敢相信他们只是在发招聘信。”他加入了团队并立即开始构建这个现在每天能跑800万虚拟英里的工具。
当时,他们主要用这个工具来观察在驾驶员需要接管控制车辆的棘手情况下车辆会做什么。他们开始从这些时刻制作场景。Stout说,"我很快就发现这是个非常有用的东西,我们可以造出很多这样的场景。"Carcraft 的能力空间范围扩大到了整座城市,车辆的数量不断变多,形成了一个庞大的虚拟车队。
Stout请来了 Elena Kolarov,她是他们“场景维护”小组的负责人,主要负责控制。 她面前有两个屏幕。右面的XView屏幕上显示了车辆的“视觉”。车辆通过使用摄像头、雷达和激光扫描来识别视野中的物体。在软件中,通过用图框形状来表示它们在真实世界中的轮廓。
从图框中延伸出来绿色线条,表示汽车对可以移动的物体的可能方式的预测。 在底部,有一个图像条,显示汽车上的常规摄像机所捕获到的目标。Kolarov 还打开了由激光扫描仪(LIDAR)返回的数据,它是以橙色和紫色的点显示的。

在Xview软件中呈现的无人车仿真测试画面
我们在Castle的环形交叉路口看到一个真正的传感器融合回放。Kolarov 将画面切换到仿真版本。虽然看起来一样,但它不再是一个数据日志,而是一个汽车必须解决的新情况。唯一的区别是在XView屏幕的顶部,它用大红字写着“Simulation”。Stout说他们不得不添加这个标识,因为人们经常把仿真场景和真实场景弄混了。
他们加载了另一种场景,即凤凰城的场景。Kolarov放大显示了他们的城市模型。Stout说,对于整座城市,他们已经得到了"所有车道在都在哪、哪条车道通向其他车道、停车标志都在哪、交通灯都在哪、哪里都限行、车道线中心在哪”的信息,梳理了你需要知道的一切。我们将镜头拉回到凤凰城附近的一个十字路口停车处。 然后 Kolaro开始欣赏由车辆、行人和自行车合成的场景。
随着按下热键,屏幕上的目标开始移动,就像真实的汽车一样,仿真的汽车模型在自己的车道行驶、转向。就像真实的骑自行车的人,仿真的骑自行车的人在屏幕里移动。他们的逻辑是由无人驾驶团队从数百万英里的公共道路驾驶中建模形成的。这一切,都是基于高精度世界地图以及场景中不同物体的物理模型,他们甚至对橡胶道和道路也已经建模。
不足为奇的是,最难的事情是模拟其他人的行为。就像我们父母常说的:"我不担心你的开车技术,我担心路上其他人的开车技术。
Way自动驾驶研发采取「仿真+道路实测」技术路线图
我们的车辆可以看到现实场景,并且它们了解现实场景。接下来它们在这个场景中扮演一个动态演员,在场景中的任何东西,包括辆车、行人、自行车、摩托车, 我们的车辆可以理解它们的意图。但仅仅通过一个空间跟踪一个东西是不够的,你必须了解它在做什么。Waymo 的副总裁Dmitri Dolgov,告诉我说,“这是建设一个可行和安全的自动驾驶汽车的关键问题。而这类模型,对世界上其他参与者的行为的理解,和在仿真中模拟他们的任务非常相似。
还有一个关键的区别: 在现实世界中,他们必须接收相关环境中最新的、实时数据,并把这些数据转换成对场景的理解,才采取驾驶行为。但现在,经过对该项目多年的努力后,他们相信可以实现,因为一系列测试表明可以识别各种各样的行人。
因此,对于大多数仿真,他们跳过了目标识别步骤。他们并没有给汽车提供原始数据,而是简单地告诉汽车:这里有一个行人。
在十字路口停车处,Kolarov正在给自动驾驶汽车制造困难。她点击了热键V,一个新的目标出现在Carcraft中,接着她鼠标移动到右侧的下拉菜单,这里有一系列不同类型的车辆可供选择,包括我最喜欢的bird squirrel。
为了测试特定的行为,不同的目标被要求遵循Waymo为它们建的模型的逻辑,或者通过场景生成器Carcraft进行编程,使其以精确的方式运动。一旦他们有了一个场景的基本结构,就可以测试它包含的所有重要的场景变形。所以,你可以想象一下在十字路口停车处,你想要测试的各种汽车和行人以及骑自行车的人的到达时间,以及他们停留多久,他们的移动速度等等,只需要把这些数值放在合理的范围之内,软件就会创建并运行所有这些场景的方案组合。
他们称之为“模糊化”,在本例中,有800个场景是由这种十字路口停车生成的。 它创造了一个漂亮的、带花边的图表,工程师们可以点进去看不同的变量组合是如何改变车辆的驾驶决定的。
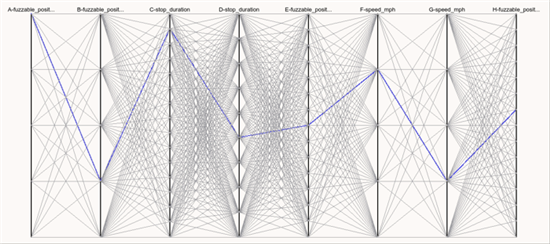
Carcraft的模糊化处理功能
问题其实可以帮助分析所有这些场景和仿真,找到有用的数据,指导工程师能够更好地驾进行操控。第一步可能是:车辆被骗了吗?如果是这样的话,这便是一个继续工作的有用场景。
在这里我们看到视频上显示的正是这种情况。这是在山景城的一个复杂的十字路口停车处真实发生的。当车辆向左拐时,一辆自行车向它靠近,导致车被迫停在了路上。工程师带着这类问题对软件进行修正,使之产生正确的结果。视频里显示的是真实场景,并在这上面进行仿真。当这两种情况出现分歧时,你会看到仿真的汽车继续前行,然后出现一个标签为"shadow_vehicle_pose"虚线框。该虚线框会显示出在现实生活中发生了什么事。对Waymo工程师来说,这是最清晰的可以看得见的进步。
但他们不只是要弄清楚车辆什么时候停止的。他们可能还想寻找太长的决定时间或超出合适范围的制动配置。工程师们正在学习或调试的任何东西,他们都会模拟去寻找问题。
Stout和Waymo软件的领导Dolgov都强调,对于仿真来说有三个核心方面:第一,他们开了很多英里,经验很丰富。第二,对与车辆来说,这些里程集中在有意义和仍然困难的交互行为,而不是没有意义的里程。第三,软件的开发周期可以快很多。
Dolgov告诉我说,"迭代周期对我们非常重要,我们在仿真上做的所有工作都使我们能够大幅收缩,早期,我们需要花好几周时间在程序循环上;现在只需要几分钟。
我问他,如果道路上有浮油、或者坏的轮胎、奇怪的鸟、灰岩坑大小的坑洞等这些东西怎么办?他们仿真这些了吗?Dolgov很乐观,他说,当然,他们可以。但是"模拟器的保真度到底有多高呢?也许对于这些问题可以得到更好的值,或者通过在虚拟世界中进行大量测试来验证你的模拟器。
Carcraft的虚拟世界的魅力并不是因为它是真实世界的一个美丽、完美、真实的渲染。它的魅力在于,它们以对自动驾驶汽车非常重要的方式反映了现实世界,并使其能够获得比物理测试多十亿英里的里程。对自动驾驶软件进行仿真,它并不像在现实世界中那样做出决策,这就像在现实世界中做决定一样。
并且它起了作用,加州DMV要求公司报告他们每年进行自动驾驶测试的里程数,以及系统脱离的次数。Waymo不仅在里程上比其他公司都多三个数量级,而且其抛锚次数也在迅速减少。
Waymo从2015年12月至2016年11月共进行了635,868英里的自动驾驶。在这所有的里程里,只有124次抛锚,也就是平均每5000英里一次或每1000英里0.20次。去年,他们进行了424,331英里的自动驾驶,其中有272次抛锚,也就是平均每890英里一次或每1000英里0.80次。
外面的专家对Waymo已采取的策略并不会感到惊讶。 Andreessen Horowitz的风险资本家Chris Dixo说,"现在,你几乎可以通过无人机团队、自动驾驶汽车团队对待仿真的重视程度来估计出自动驾驶的复杂度。”他曾带头对Improbable这家仿真公司进行投资,在他看来,Waymo是最顶端,最先进的公司。
我向好事达州保险公司的创新负责人Sunil Chintakindi询问了Waymo的项目。 “没有一个可靠的仿真基础设施,你就不可能制造出更高级别的自动驾驶汽车。” 在这件事上,我不会和想法不同的人交谈。
其他自动驾驶汽车研究人员也追求相似的路径。 Huei Peng是密歇根大学自动驾驶和智能网联汽车实验室Mcity的主任。他说,任何自动驾驶汽车的系统都是超过99%仿真,加上一些精心设计的结构化测试,再加上一些道路上测试。
他和一个研究生共同提出了一个公路里程与仿真结合的系统,以加快测试速度。 这与Waymo的做法并无不同。Peng说“所以,我们争论的只是剪去驾车测试中没有意义的部分,而把注意力集中在有价值的部分。这可以让你的测试加速上百倍:即一千英里变成了一百万英里。
令人惊讶的是Waymo的项目的规模、 组织和强度。我向Peng描述了谷歌已经采用的结构化测试,包括结构化测试团队在Castle把20,000个场景进行仿真的事情。但他听错了并开始说," 2,000个场景是令人很吃惊的,当我插嘴纠正了他, "是20,000方案"。他停顿了一下,说"20,000",思考片刻后又说,"这是令人印象深刻的。”
在现实中,这20000种场景只代表了waymo所有测试场景的一小部分。它们只是从结构化测试中创建的。他们有更多的场景比来自公众的驾驶和想象力
Peng说,“他们做得非常好,就自动驾驶第四级而言,他们远远领先于其他所有人”。
但Peng还表明了传统汽车主机厂的态度。他说他们正试图做从根本上来说完全不同的事情。他们正在添加辅助驾驶技术,"赚一点小钱",然后向完全自动驾驶方向前进。与Waymo比较,这是不公平的。它拥有资源和企业自由,可以在汽车上投入70000美元的激光雷达,而雪佛兰这样的汽车制造商可能会将40000美元视为大众市场采用的价格上限。
“通用,福特,丰田,还有其他主机厂表示:“让我减少车祸和死亡事故的数量,增加大众市场的安全。”Peng说,他们的目标完全不同,“我们需要考虑上百万辆车,而不仅仅是上千辆。”
甚至在争取完全自动驾驶的竞赛中,Waymo现在面临的挑战比以前更多了,尤其是对手特斯拉。Chris Gerdes是斯坦福大学自动驾驶汽车研究中心的主任,18个月前,他告诉我的同事阿德里安·拉弗兰斯(Adrienne LaFrance),Waymo对问题的深度有更深入的洞察力,比其他任何人更接近解决问题的方法。上周我问他,他是否仍然认为这是正确的。他说,“已经发生了很大的变化。
他说:“福特和通用等汽车制造商已部署自己的车辆并建立了道路数据集。”特斯拉现在已经从Autopilot部署策略积累了极其庞大的数据,了解系统在客户体验的条件下如何运行,并迅速扩大车辆基数,二者结合起来形成一个惊人的平台。
这是迈向人工智能领域的一个巨大飞跃,甚至在Alphabet公司内部,也一直积极地采用AI。这不是谷歌的云端相册应用,在那里一个错误并不意味着什么。这个系统将彻底影响人类世界。它懂我们的规则,会交流它的想法。我们的眼睛和大脑很容易读懂它。
Waymo似乎把自动驾驶作为一项专项技能,以致于在速度和方向方面落后了。他们现在正在从事的是一项人类社会活动。现在开车不仅仅是“合法”,“正常”就可以,那么一个受过人工智能训练的人意味着什么呢?
事实证明,建立这种人工智能不只是需要无穷无尽的数据和工程技术,这些只是必要的,但还不够。相反,建立这种人工智能需要人类与汽车的同步,像他们一样了解世界。从「城堡」出来的司机知道,只有尽可能多的了解车辆,才能融入这些车中的,像他们一样的去观察场景并做出决定决定是什么。也许这也是双向的: 人类对汽车了解得越深,汽车就越了解人类。
在奥斯汀环岛的记忆是「城堡」的一部分、是自动驾驶汽车的数据日志、是Carcraft的场景来源、是仿真的网络、是真实自动驾驶汽车的软件部分。
即使在仿真中抽象的多边形,也是AI用来认识世界的工具、也有人类梦想的足迹、也是回忆的碎片、更是驾驶员的情感。并且这些部分既不是人类犯的错误也不是人类的污点,不需要被清除。而是系统中必要的组成部分,它可以彻底改变交通、城市,甚至几乎所有的东西。
「揭秘Waymo是如何进行自动驾驶测试验证」相关推荐
「揭秘Waymo是如何进行自动驾驶测试验证」相关文章
- 谷歌Waymo和景驰申请加州全自动驾驶测试
- 克莱斯勒为Waymo提供6.2万辆自动驾驶测试车
- 丰田利用Ha:mo Ride驾驶数据进行验证测试
- PSA与nuTonomy合作进行自动驾驶路测
- 软银在商业街进行自动驾驶巴士的道路实测
- 沃尔沃或明年在新加坡进行自动驾驶路测
- 塔塔汽车在Hexa上进行自动驾驶技术演示
- 宝马亮相进博会 将进行自动驾驶路试
- 博世获批在澳大利亚进行自动驾驶路测
- 苹果泰坦计划又获新专利 可进行自动驾驶