noTonomy自动驾驶行驶230英里 接管频繁
马萨诸塞州波士顿市日前批准nuTonomy在海港区(SeaportDistrict)和Fort Point的道路上测试自动驾驶汽车,这使波士顿与nuTonomy共同开展的为期一年的试点项目进一步扩张。从今年1月起,该项目一直在雷蒙德·L·弗林海洋园区(RaymondL Flynn Marine Park)测试自动驾驶汽车。

nuTonomy将扩大在波士顿的自动驾驶测试道路区域
此次扩展将使nuTonomy能在车流量更大、更复杂的道路上进行自动驾驶汽车测试。在测试过程中,车内全程都安排有人类驾驶员。这些车辆将需要应对桥梁、下穿交叉道、多车道路段、自行车道、信号化交叉路口和环岛等道路条件,能帮助自动驾驶软件做更多改进。

扩展后的 nuTonomy 自动驾驶汽车测试区域
nuTonomy的目标是在全世界率先部署全自动驾驶随选交通(mobility-on-demand) 服务,其之前公布的在新加坡实现商业化部署的时间是2018年,不过从其近日公布的1季度在波士顿市的测试报告看,这一目标的实现有些玄。
报告显示,截至3月中旬,nuTonomy使用自动驾驶模式在波士顿的运行230英里,行驶地点一直在雷蒙德·L·弗林海洋园区的公共道路——主要是在Drydock大街、BlackFalcon大道和一些比较狭窄的分支道路上。测试条件包括天气晴好的白天和夜间,以及小雨天,行驶期间并未发生碰撞事故和“意料之外的故障”或“使用自动驾驶模式时发生中断”。

在波士顿测试的nuTonomy自动驾驶车辆
但从nuTonomy列出的导致人工接管发生的一些情况判断,接管控制的频次应该比较高。
遇到执行任务的应急救援车辆时(例如,警察巡逻车开启警灯,命令其他车辆靠边停车);其他车辆在单行道上逆行(Black Falcon大道的单行道路段)自动驾驶车辆附近道路上有笨重的大型施工车辆或设备(例如起重机或叉车);有车辆在道路上加油(这在BlackFalcon大道的部分路段比较普遍);自动驾驶汽车附近的其他车辆存在反常行为。
nuTonomy解释称,安全驾驶员会在某些情况手动接管控制,但这并不表示在这些情况下继续运行自动模式一定会存在危险。因为其要求驾驶员“慎之又慎”,所以已经预料到在很多自动驾驶汽车能妥善处理的情况中驾驶员也会接管控制权。
VehicleTrend对nuTonomy在2018年实现自动驾驶汽车商业化部署不乐观的原因还包括,其自动驾驶软件缺乏多情境的训练学习,更缺乏自我判断决策能力。nuTonomy在报告中对这方面也有所表示,提到了在波士顿测试遇到的挑战:
马萨诸塞湾交通局银线(Silver Line)公交车:软件学会了如何正确地将波士顿的铰接公交车进行归类;
重型机械:在海港区(Seaport) 的建筑工地和工业区,遇到了许多需要辨别和绕行的不常见车辆与障碍;
车辆“堵塞交叉路口”(blocking the box):在某些时段,Drydock大街上等红灯(位于Summer大街交叉路口)的车流会堵塞Drydock大街至Harbor大街之间的多个交叉路口,造成车辆彼此阻碍的混乱局面;
海鸥:自动驾驶汽车多次遇到站在路面和在传感器探测范围内飞行的海鸥,现在已经能准确地进行辨别。
低速:自动驾驶汽车的速度设定为波士顿默认的25英里/小时车速上限。
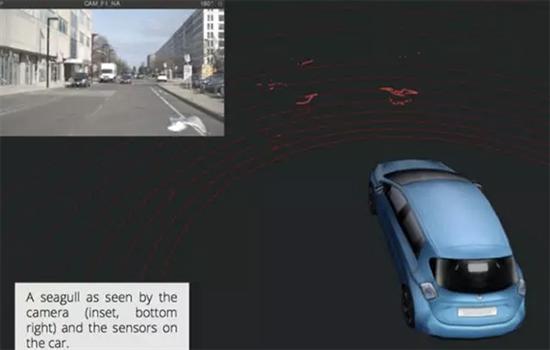
车辆摄像头(内置和右下方)和传感器“眼中的”一只海鸥
nuTonomy成立于2013年,是麻省理工学院(MIT)的一家衍生公司,主要从事自动驾驶汽车软件开发。nuTonomy2014年开始测试自动驾驶汽车,并且从去年夏天至今一直在新加坡的公共道路上进行测试。今年1月,其在波士顿的公共道路测试项目正式展开。nuTonomy在波士顿新一阶段测试将首先在天气良好的白天进行,之后再进行夜晚和其他天气条件下的测试。
「noTonomy自动驾驶行驶230英里 接管频繁」相关推荐
4. António Maria de Mello Breyner Félix da Costa/安东尼奥·费利克斯·达·科斯塔
「noTonomy自动驾驶行驶230英里 接管频繁」相关文章
- NuTonomy拟在新加坡推自动驾驶叫车服务
- nuTonomy与Scale发布自动驾驶数据集nuScenes
- Autódromo Hermanos Rodríguez/罗德里格斯兄弟赛道
- 沃尔沃本土化举步维艰 高管频繁离巢
- Embark自动驾驶半挂卡车测试 里程2400英里
- 保时捷又推新车 最高时速可达230英里
- Marcus "Bosse" Grönholm/马库斯·格伦霍姆
- Uber自动驾驶累计行驶里程达100万英里
- Waymo自动驾驶上路行驶累计达400万英里
- 德尔福拟收购nuTonomy 无人驾驶计划提速